El péndulo simple o matemático es un sistema idealizado constituido por una partícula de masa m que está suspendida de un punto fijo O mediante un hilo inextensible y sin peso. Naturalmente es imposible la realización práctica de un péndulo simple, pero si es accesible a la teoría.
El péndulo simple o matemático se denomina así en contraposición a los péndulos reales, compuestos o físicos, únicos que pueden construirse.
Ecuación del movimiento

[editar]Método de Newton
Consideremos un péndulo simple, como el representado en la Figura. Si desplazamos la partícula desde la posición de equilibrio hasta que el hilo forme un ángulo Θ con la vertical, y luego la abandonamos partiendo del reposo, el péndulo oscilará en un plano vertical bajo la acción de la gravedad. Las oscilaciones tendrán lugar entre las posiciones extremas Θ y -Θ, simétricas respecto a la vertical, a lo largo de un arco de circunferencia cuyo radio es la longitud,  , del hilo. El movimiento es periódico, pero no podemos asegurar que sea armónico.
, del hilo. El movimiento es periódico, pero no podemos asegurar que sea armónico.
, del hilo. El movimiento es periódico, pero no podemos asegurar que sea armónico.Para determinar la naturaleza de las oscilaciones deberemos escribir la ecuación del movimiento de la partícula.
La partícula se mueve sobre un arco de circunferencia bajo la acción de dos fuerzas: su propio peso (mg) y la tensión del hilo (N), siendo la fuerza motriz la componente tangencial del peso. Aplicando la segunda ley de Newton obtenemos:

siendo at, la aceleración tangencial y donde hemos incluido el signo negativo para manifestar que la fuerza tangencial tiene siempre sentido opuesto al desplazamiento (fuerza recuperadora).
Al tratarse de un movimiento circular, podemos poner

siendo  la aceleración angular, de modo que la ec. dif. del movimiento es:
la aceleración angular, de modo que la ec. dif. del movimiento es:
la aceleración angular, de modo que la ec. dif. del movimiento es:
Esta ec. dif. no corresponde a un movimiento armónico simple (m.a.s.) debido a la presencia de la función seno, de modo que podemos asegurar que el movimiento del péndulo simple no es armónico simple, en general.
[editar]Método de Lagrange
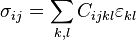
El lagrangiano del sistema es

donde  es la elongación angular (ángulo que forma el hilo con la vertical) y
es la elongación angular (ángulo que forma el hilo con la vertical) y  es la longitud del hilo. Aplicando las ecuaciones de Lagrange se sigue
es la longitud del hilo. Aplicando las ecuaciones de Lagrange se sigue
es la elongación angular (ángulo que forma el hilo con la vertical) y es la longitud del hilo. Aplicando las ecuaciones de Lagrange se sigue
y obtenemos la ecuación del movimiento es

de modo que la masa no interviene en el movimiento de un péndulo.






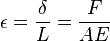

 es su elongación o variación que experimenta su longitud.
es su elongación o variación que experimenta su longitud.
 o
o  intrínseca, se tiene:
intrínseca, se tiene:
 a la tensión en una sección del muelle situada una distancia x de uno de sus extremos que tomamos como origen de coordenadas,
a la tensión en una sección del muelle situada una distancia x de uno de sus extremos que tomamos como origen de coordenadas, 



